
| Diese Seite ist veraltet. Die aktualisierte Version liefert dieser Link.
|
||
40 Zeilen auf RP Pico W NeoPixel/WS2812-Uhr: Ansteuerung und Synchronisation auf die bequeme Art - reloaded again |
||
|
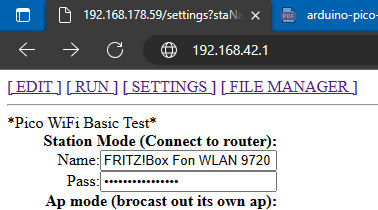
Der Anwender kann per Drag & Drop die in diesem Archiv gepackte *.uf2-Software auf das Laufwerk des Pico W ziehen. Der Pico startet dann den BASIC-Interpreter, welches eine Teilmenge des von mmiscool geschaffenem ESP8266Basic ist, welches auch in den Büchern [3] und [4] dieser Homepage verwendet wird. Als Proof of Concept soll diese Neopixel-Uhr einer Funktion zugeführt werden. Die Teilmenge erlaubt die Ansteuerung der NeoPixel über GPIO 0 (Pin 1 auf dem Board). Wer ESP8266BASIC kennt, kann den Pico per USB mit dem PC bei gedrücktem BOOTSEL-Button des Boards verbinden. Durch das Kopieren der uf2-Datei auf das nun erscheinende Laufwerk wird das Basic-Betriebssystem übertragen. Nach Abschluss der Übertragung meldet sich der Pico als Laufwerk ab und die PicoW-Variante steht zur Verfügung. Der Flash-Prozess ist damit abgeschlossen. Die zunächst nur für diesen Einsatz portierte Version unterstützt bereits einige Besonderheiten des PicoW, die an anderer Stelle beschrieben werden sollen oder sind. Für die NeoPixel-Uhr ist besonders hervorzuheben, dass die Sommer- und Winterzeit-Umstellung automatisch erfolgt. Damit entfallen Anfragen in Richtung time.setup... Die Uhrzeit wird per Internet synchronisiert, so dass ein Pi PicoW zwingend über einen Router diesen Zugang erhält. Zu Beginn kennt der PicoW üblicherweise keinen Router und spannt einen eigenen HotSpot (Access-Point) auf, der mit der Bezeichnung PicoW beginnt. Durch Verbindung mit diesem WiFi-Netz ist das Basic über die IP 192.168.42.1 erreichbar. In den Settings kann nun der gewünschte Router mit Password eingetragen werden. Mit Save übernimmt Basic die Einstellungen für den nächsten Start (Restart). Details findet man auf der Webseite von ESP8266Basic oder im Buch MSR mit WiFi und ESPBASIC oder MSR mit Smartphone und Tablet. Um einen 60-LED-NeoPixel-Streifen als Rheinturmuhr an Pin 1 zu betreiben sind folgende Schritte erforderlich
Die serielle Ausgabe zeigt die lokale IP z. B.
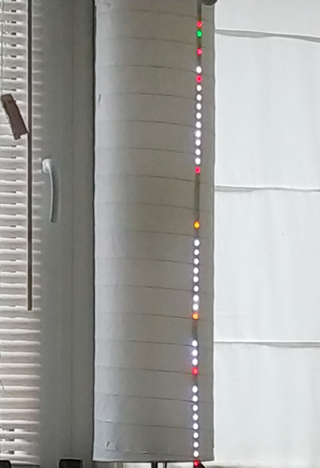
Die 40 Zeilen der Rheinturmuhr sorgen dafür, dass die NeoPixel diese Dezimaluhr anzeigen. Diese Zeilen sind über das Menü EDIT in ein leeres Programm-Feld zu kopieren und als default.bas zu speichern. Das Basic-Programm soll später nach einem Neustart des PicoW automatisch von Basic gestartet werden. Nach Save kann mit RUN das Uhrenprogramm gestartet und getestet werden. Wenn alles zur Zufriedenheit funktioniert kann der Autostart von default.bas in den SETTINGS per Haken eingeschaltet werden. Nach einem Reset startet nun die Uhr automatisch:
Dies alles sieht auf einem Smartphone wie folgt aus. Ein erweitertes espBASIC-Programm: Die Helligkeit bzw. Intensität des Streifens legt die Variablen i fest und kann über die Spannung an ADC0 beeinflusst werden: i = io(ai)/15+5. Ist dieser Analogeingang mit GND verbunden, so ist die geringste Helligkeit eingestellt, eine externe Spannungsversorgung ist so nicht erforderlich. Ein LDR mit Vorwiderstand kann die Intensität automatisch steuern wie bei einem ESP8266-Witty-Cloud. Bei zu starker Belastung des Pi Pico durch den Streifen treten unschöne Flackereffekte auf. Wer möchte kann als Spielerei die Temperatur im Pico als Intensitäts-Kriterium heranziehen. Der Aufruf i = io(ai,3) gibt den Messwert in Celsiusgraden zurück. Eine weitere Pico-Funktion io(bootsel) liefert den Status des Tasters und io(po,25,1) schaltet die LED des Boards an. Dim i i = 20 Neo.setup(0) Neo.Cls() Print "RTC WS PICOW GPIO 0" Gosub [marker] Timer 1000,[uhr] Wait [uhr] ' i = io(ai)/15+5 'Helligkeit via ADC0 o = 1 t$ = Time("hour:min:sec") s0 = Val(Mid(t$,8,1)) b = s0 And 1 Neo(46,0,b*i,00) Neo(47,0,(1-b)*i,00) If s0 = 0 Then Neo.stripcolor(1,9,0,0,o) s1 = Val(Mid(t$,7,1)) Neo.stripcolor(11,10+s1,i,i,i) If s1 = 0 Then Neo.stripcolor(11,10+5,0,0,o) m0 = Val(Mid(t$,5,1)) Neo.stripcolor(17,16+m0,i,i,i) If m0 = 0 Then Neo.stripcolor(17,16+9,0,0,o) m1 = Val(Mid(t$,4,1)) Neo.stripcolor(27,26+m1,i,i,i) If m1 = 0 Then Neo.stripcolor(27,26+5,0,0,o) h0 = Val(Mid(t$,2,1)) Neo.stripcolor(33,32+h0,i,i,i) If h0 = 0 Then Neo.stripcolor(33,32+9,0,0,o) h1 = Val(Mid(t$,1,1)) Neo.stripcolor(43,42+h1,i,i,i) If h1 = 0 Then Neo.stripcolor(43,42+2,0,0,o) Cls 'Gosub [up] Gosub [marker] End If Serialprint t$ Neo.stripcolor(1,s0,i,i,i) x = Val(Mid(t$,4,2))*100 x = Val(Mid(t$,7,2))+x If (x > 5954) Then Neo.stripcolor(50,60,100,100,100) Gosub [pip] Delay 60 If (x<5959) Then Neo.stripcolor(50,60,0,0,0) Else Gosub [up] Gosub [marker] End If End If If (x = 3000) Then Gosub [pip] Gosub [up] Gosub [marker] End If If x = 0 Then 'Io(pwo,15,127) Else Io(pwo,15,0) End If Wait [pip] Pwmfreq 880 Io(pwo,15,127) Delay 40 Io(pwo,15,0) Return [up] For z = 1 to 60 Neo.shIft(41,60,-1) Neo.shIft(21,40,-1) Neo.shIft(1,20,-1) Next z Neo.Cls() Return [marker] Neo(00,i,00,00) Neo(10,i,00,00) Neo(16,i,i/2,00) Neo(26,i,i/2,00) Neo(32,i,00,00) Neo(42,i,00,00) Neo(45,i,00,00) Neo(48,i,00,00) Return
Dieses espBASIC berücksichtigt die Eigenart, dass ein Pi PicoW ab und zu die Verbindung zum Router nicht wieder aufnimmt und somit nur noch zu Fuß erreichbar ist. Das BASIC überprüft dies und leitet bei einer Unterbrechung eine erneute Verbindung ein. Sollte dem espBASIC-Interpreter im PicoW die Kontrolle länger als acht Sekunden entzogen werden, so erfolgt ein Zwangs-Reset. Dieses Verfahren soll dafür sorgen, dass ein PicoW auf jeden Fall erreichbar bleibt, solange ein Router aktiv ist. Damit bleibt auch die Uhrzeit über das Internet auf dem aktuellen Stand.
|


Compact Red Needle
MSR mit Arduino & Compact
Mehr Software
| Startseite | Bücher | Software | Digital RTV | Musik | Kontakt |
Für Inhalt und weitere Verzweigung externer Links sind die Betreiber der dortigen Seiten verantwortlich - H.-J. Berndt