
|
|
||
Mit wenigen Klicks einen bipolaren Schrittmotor in Rotation versetzen |
||
|
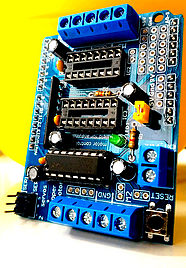
Drei gesockelte IC und zwölf Schraubverbinder - für kleines Geld bei Christians Technik-Shop erworben - befinden sich auf dem Motor-Shield-V1 für den Arduino Uno. Schritt-, Servo- und Gleichstrommotoren lassen sich damit kinderleicht ansteuern, wie hier gezeigt werden soll. Zwei Sockel sind leer, da sie in zwei anderen Beiträgen auf dieser Seite auf einem Breadboard im Zusammenhang mit Compact Red Needle benutzt werden. Einmal das Schieberegister Falls die Arduino IDE bereits für den UNO eingerichtet ist, führen wenige Klicks zum Ziel den hier benutzten Schrittmotor zur Rotation zu bewegen, falls das IC 74HC595 in der Mitte wieder eingesetzt ist.
Je nach Motorvariante den Sketch anpassen, oder nicht. Hier soll ein Motor mit 200 Schritten an den unteren Anschlüssen M1 und M2 an Port #1, bewegt werden. Darum die Änderung einer Zeile:
Ein motor.setSpeed(20); // 20 rpm lässt dieses Exemplar eines bipolaren Schritt-Motors ruhiger laufen. Das war's. Zwei Schraubanschlüsse dienen der externen Spannungs-Versorgung für höhere Motorströme. Dabei sollte der gelbe Jumper entfernt sein. Wer die Dinge etwas genauer untersuchen möchte, der kann die verwendeten Bausteine auch einzeln unter die Lupe nehmen, wie das in den beiden oben angegebenen Links gezeigt wird. Genau diese Treiberbausteine befinden/befanden sich in einem SIOS-Interface, was zu seiner Zeit diese Motoren direkt ansteuern konnte bzw. heute noch kann. Der Assemblerkurs auf dieser Seite verwendete dieses Gerät ebenfalls. |
Schieberegister 74HC595
Motor-Treiber-Baustein L293D
MSR mit Arduino & Compact
Compact Red Needle
Mehr Software
| Startseite | Bücher | Software | Digital RTV | Musik | Kontakt |
Für Inhalt und weitere Verzweigung externer Links sind die Betreiber der dortigen Seiten verantwortlich - H.-J. Berndt